返回列表

可全向移动agv小车顾名思义是在二维空间内可以任意运行的一种车辆。
一般应用于高端设备的组装对接和狭小空间的工件转运,因其转弯灵活,适应性较强,广泛应用于航天制造、冶金化工、生物制药等一些高端制造业中。
一、技术参数
| 序号 | 形式要求 | |
| 1 | 整体构造 | 移动与升降一体式 |
| 2 | 运行方式 | 轮式(舵轮) |
| 3 | 舵轮数量 | 4轮 |
| 4 | 载重量(吨) | 10 |
| 5 | 冲击载荷(吨) | 15 |
| 6 | 载重面外形尺寸(mm) | 3200*2200 |
| 9 | 车轮直径(mm) | ≥280 |
| 10 | 车轮宽度(mm) | ≥160 |
| 11 | 整车高度(mm) | ≤650 |
| 12 | 运行速度(m/min) | 0-25 (可调速度旋钮) |
| 13 | 离地高度 | ≥50mm |
| 14 | 移动方向 | 全方位移动 |
| 15 | 转弯方式 | 移动转弯且360°原地转弯 |
| 16 | 越障能力 | 整车可以越过宽90mm的铁轨地沟 |
| 17 | 升降方式 | 液压剪式升降(带泄压保护装置) |
| 18 | 举升部位 | 上台面举升 |
| 19 | 升降行程(mm) | ≥400 (带高度限位) |
| 20 | 操作方式(走行及升降) | 有线与无线兼容遥控器 |
| 21 | 停车定位精度 | ±5 mm |
| 22 | 转弯电控控制方式 | 电器按钮控制 |
| 23 | 驱动形式 | 伺服电机驱动 |
| 24 | 刹车方式 | 电磁刹车 |
| 25 | 供电方式 | 锂电池(免维护) |
| 26 | 续航能力 | 满载连续运行大于4H(48V320Ah) |
| 27 | 充电时间 | <5小时充满,防过充的功能 |
| 28 | 锂电池寿命 | 循环次数2000 (容量≥80%标称容量) |
| 29 | 报警装置 | 声光报警 |
| 30 | 安全装置 | 遇障碍物自动停车(0〜2000mm可调节) |
| 31 | 平车保护 | 过压、欠压、过流保护 |
| 32 | 相对湿度 | 10%-90% |
| 33 | 环境温度(°C) | -60 |
| 34 | 适应海拔(m) | 2500 |
| 35 | 车体颜色 | 黄色+警示标志 |
| 36 | 其他功能 | 急停开关、驻车制动 |
二、设计图纸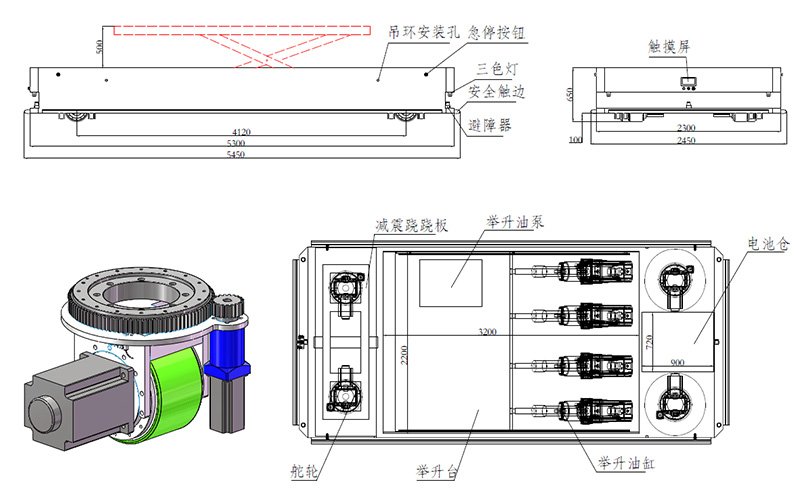 1)机械部分
1)机械部分
机械部分包括车体、控制面板、四舵轮、减震跷跷板、铰链缓冲机构、电池、控制柜等。
agv小车主体结构采用矩形管材结构焊接而成,车体车架连接桥架部分主材选用矩形管组焊成形,经过有限元分析,强度、刚度均满足设计要求。
控制面板用于安装系统完成各类动作的控制按钮、系统状态指示灯、急停按钮等,并注有相关操作标识。
驱动结构采用四舵轮结构,可实现车体的前进、后退、转弯、原地旋转等运动。
舵轮是集成了驱动电机、转向电机、减速机等一体化的机械结构,舵轮集成化高、适配性强、配合同款伺服控制系统(控制器、伺服驱动器),可快速部置AGV、移动式机器人。系统均选用具有电磁抱闸功能的驱动电机和转向电机,能够有效地防止由于车体断电造成平台发生移动,影响车体平台上的拆装和停放作业,进而提高操作的稳定性及安全性。
2)电气控制系统
agv小车电气控制系统主要由硬件与软件两部分组成。
硬件部分主要包括主控制柜、PLC控制器、触摸屏、磷酸铁锂电池、避障传感器、手持遥控器、接收器、伺服控制系统,车载充电连接器等。
软件部分主要包含PLC控制软件及触摸屏组态软件。
agv小车系统PLC可对各类开关量信号、模拟量信号进行实时数据采集,A/D转换、并经过相应的控制逻辑运算实现系统各功能控制逻辑关系,同时通过以太网通讯可实现与上位机人机交互。系统采用电气自动控制不仅能减少安装工作量,且针对控制所需修改调整方便,具有操作简易,适应性强,可靠性高,抗干扰能力强的特点,尤其是灵活与扩展方面比传统的手动控制方式更具有优势。同时系统预留WiFi、以太网接口等扩展口,便于后期系统功能扩展。